
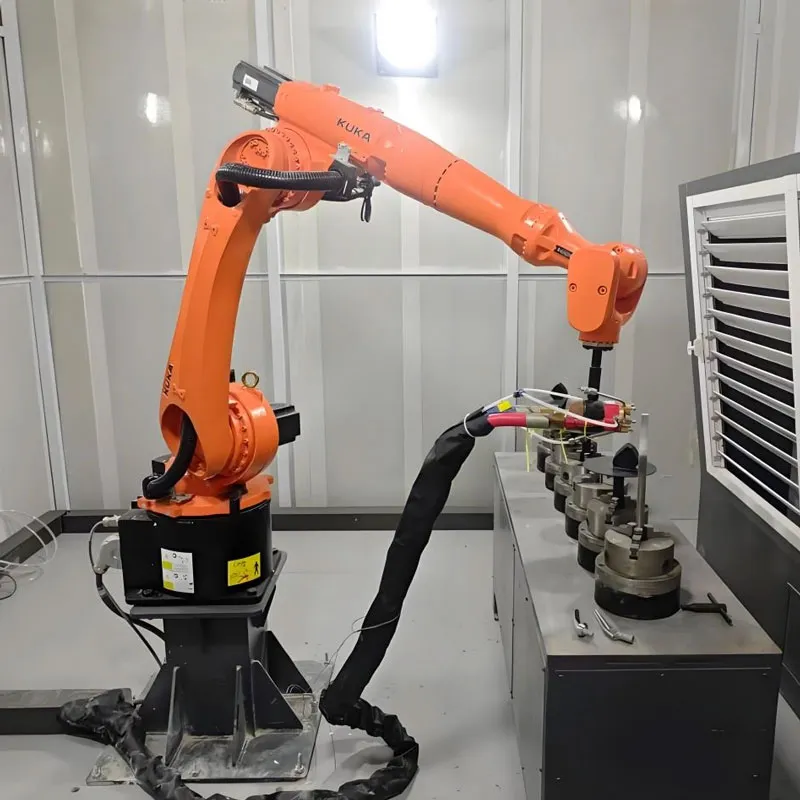
поворотный стол для газотермического напыления для роботизированной руки
Когда говорят про автоматизацию газотермического напыления, все сразу думают о роботе — его кинематике, траекториях, точности. А про поворотный стол часто вспоминают постфактум, как про простую ?болванку?, которая крутится. И это первая ошибка, которая потом аукается на объекте — когда покрытие ложится неравномерно из-за биения, или когда деталь сложной формы просто не получается равномерно обработать с одного угла. Я сам через это проходил, пока не понял, что стол — это не дополнение к системе, а её полноценный узел, определяющий качество всего процесса.
Не просто вращение, а управляемая ось
Ключевое слово здесь — управляемость. Хороший поворотный стол для газотермического напыления должен быть синхронизирован с роботом не просто по сигналу ?старт-стоп?, а в единой системе координат. Мы как-то ставили комплекс на заводе по ремонту турбинных лопаток. Робот — шестиосевой, дорогущий, траектории просчитаны идеально. А стол взяли ?экономный?, с шаговым приводом и ручным управлением оборотами. В итоге — ступеньки на покрытии в местах перекрытия проходов. Робот отрабатывал свой путь, а позиция детали менялась дискретно, рывками. Пришлось переделывать, интегрировать стол с контроллером робота через Profinet, чтобы была реальная интерполяция движения.
Тут ещё нюанс — момент инерции. Когда на столе закреплена массивная деталь, например, вал гидротурбины, разогнать и точно остановить её — та ещё задача. Привод должен иметь запас по моменту, а конструкция — минимальный люфт. Мы используем сервоприводы с прямоприводными моторами или редукторы с высоким КПД. Люфт в паре ?червяк-колесо? даже в пару угловых минут для тонких покрытий уже критичен. Видел решения, где ставят двухдвигательную систему для компенсации зазора, но это сложно и дорого в наладке.
И ещё про крепление. Универсальных патронов или планшайб не бывает. Под каждую группу деталей — своя оснастка. Важно предусмотреть на столе стандартизированные интерфейсы для её быстрой смены: например, фланцы с позиционирующими штифтами и гидро- или пневмозажимами. Иначе половина времени цикла уходит на ручную юстировку.
Термические и механические нагрузки: что не пишут в каталогах
Производители часто указывают точность позиционирования и грузоподъёмность в ?холодном? состоянии. Но в реальности стол работает в полуметре от факела плазмы или газопламенной струи. Локальный нагрев может достигать сотен градусов, даже если сама деталь охлаждается. Отсюда — тепловые деформации станины и подшипниковых узлов.
Был у нас случай с напылением керамики на алюминиевый теплообменник. Деталь большая, но тонкостенная. Чтобы не повело, нужен был медленный, но равномерный прогрев. Робот вёл факел по сложной траектории, а стол должен был вращаться с переменной скоростью, замедляясь в зонах интенсивного нагрева. Стандартный ПИД-регулятор привода с этим не справлялся, возникали автоколебания. Пришлось писать кастомный алгоритм управления, учитывающий тепловую карту детали. Это к вопросу о том, что ?умным? должен быть не только робот.
И про пыль и брызги. Частицы напыляемого материала — абразив. Они оседают на направляющих, попадают в уплотнения. Конструкция стола должна быть максимально закрытой, с продувкой защитных кожухов воздухом под избыточным давлением. Обычные лабиринтные уплотнения здесь слабоваты, лучше комбинированные — контактные со специальной термостойкой резиной и щелевые с отводом продуктов из зоны.
Интеграция в линию: протоколы, безопасность и ?подводные камни?
Современный цех — это не один робот со столом, а линия. Может быть конвейер подачи, камера предварительной обработки (пескоструйка), сам напылительный пост, затем пост контроля. Стол должен встраиваться в этот поток. Тут важна не только механическая стыковка, но и обмен данными. Мы часто работаем с оборудованием от ООО Чжэнчжоу Лицзя Термического Напыления Оборудования — у них в каталоге есть поворотные столы, которые из коробки поддерживают основные промышленные протоколы (EtherCAT, PROFINET, DeviceNet). Это сильно экономит время на интеграцию. Заходишь на их сайт https://www.lijiacoating.ru — видишь, что компания профессионально занимается именно исследованиями и производством оборудования для термического напыления, и это чувствуется в деталях их изделий: продуманы кабельные вводы, места для датчиков, модульная конструкция.
Но даже с готовыми решениями есть нюансы. Например, выбор места установки датчика нулевой метки. Если он стоит на двигателе, а редуктор имеет упругий элемент (муфту) или люфт, то реальное положение стола будет ?уплывать?. Датчик нужно ставить непосредственно на выходной вал или планшайбу. Это кажется очевидным, но в погоне за простотой монтажа этим часто пренебрегают.
Безопасность — отдельная тема. Стол с тяжёлой деталью — источник кинетической энергии. Должны быть механические стопоры на случай отказа привода, а также программные ограничения зоны вращения, особенно если рядом работают люди на этапе загрузки/выгрузки. Сигналы аварийного останова (E-Stop) со стола должны быть включены в общий контур безопасности роботизированной ячейки.
Экономика процесса: когда окупается точность
Дорогой, высокоточный стол — это не просто трата денег. Это инвестиция в стабильность процесса и экономию материала. При напылении дорогостоящих порошков, например, карбида вольфрама или специальных сплавов, коэффициент использования материала (deposition efficiency) — ключевой параметр. Если из-за биения стола или неточного позиционирования часть порошка пролетает мимо детали или ложится неравномерно (и потом идёт на перешлифовку), потери исчисляются тысячами долларов в месяц.
Мы считали для одного завода: переход со стола с точностью ±0.5° на стол с точностью ±0.05° (и с лучшей кинематикой) увеличил эффективность использования порошка на 7% для сложнопрофильных деталей. Окупаемость модернизации — меньше года. И это без учёта снижения брака и трудозатрат на доработку.
Поэтому при выборе часто смотрю не на стартовую цену, а на совокупную стоимость владения. Надёжный привод, качественные подшипники, защищённая конструкция — это меньше простоев на ремонт. Сотрудничество с профильными производителями, вроде упомянутого ООО Чжэнчжоу Лицзя, которые понимают специфику именно газотермических процессов (а не просто делают вращающиеся платформы), в итоге выгоднее. Они, к примеру, сразу предлагают варианты исполнения с водяным охлаждением корпуса или со специальными огнеупорными экранами — мелочи, которые на объекте оказываются критичными.
Взгляд вперёд: что ещё можно улучшить
Сейчас много говорят про Индустрию 4.0. Для поворотного стола это означает встроенную диагностику. Датчики вибрации на подшипниковых узлах, термопары в станине, мониторинг тока двигателя. Это позволяет перейти от планового обслуживания к обслуживанию по состоянию. Предсказать, когда начнёт разбалтываться подшипник из-за попадания абразива, и заменить его до аварийной остановки линии.
Другое направление — адаптивность. Представьте, что стол оснащён простой 2D-камерой. Перед началом напыления он делает быстрый скан контура детали, закреплённой в оснастке. И корректирует свою нулевую точку и даже программу вращения, компенсируя погрешность установки. Это уже не фантастика, такие пилотные проекты есть. Особенно актуально для ремонтных производств, где каждая деталь — немного уникальна.
В итоге, возвращаясь к началу. Поворотный стол для газотермического напыления — это такой же стратегический компонент роботизированной ячейки, как и манипулятор. Его выбор нельзя делегировать только монтажникам или покупать по остаточному принципу. Нужно считать процесс в комплексе, смотреть на интеграцию, на нагрузки и на экономику. И тогда этот ?простой вращатель? станет не источником головной боли, а гарантом стабильно высокого качества покрытия. Именно на такой комплексный подход, кстати, и заточены разработки компаний, которые, как ООО Чжэнчжоу Лицзя, сфокусированы на полном цикле — от исследований до серийного оборудования. Это видно по тому, как устроены их изделия: в них есть понимание технологии изнутри.
Соответствующая продукция
Соответствующая продукция






Самые продаваемые продукты
Самые продаваемые продукты-
 Шестиосевой роботизированный манипулятор
Шестиосевой роботизированный манипулятор -
 F1500
F1500 -
 C-3000T
C-3000T -
 C-1000
C-1000 -
 Вертикальная одноместная
Вертикальная одноместная -
 Глинозем – 3% титана O (Al₂O₃ – 3% TiO₂)
Глинозем – 3% титана O (Al₂O₃ – 3% TiO₂) -
 Интегрированная система
Интегрированная система -
 Импульсный пылеуловитель
Импульсный пылеуловитель -
 Система атмосферного плазменного напыления с тремя анодами
Система атмосферного плазменного напыления с тремя анодами -
 LH-5000 – Газовая сверхзвуковая система напыления
LH-5000 – Газовая сверхзвуковая система напыления -
 Серый алюмооксидный керамический порошок, 92% Al2O3
Серый алюмооксидный керамический порошок, 92% Al2O3 -
 LBP-100 – Система атмосферного плазменного напыления
LBP-100 – Система атмосферного плазменного напыления
Связанный поиск
Связанный поиск- 3D-печать методом плазменного напыления
- машины для газотермического напыления
- пневматический питатель порошка
- пылеуловители на компрессорных станциях
- поворотный стол для газотермического напыления для промышленного использования
- горелки для газотермического напыления металлических сплавов
- компактный поворотный стол для газотермического напыления
- плазменная горелка с дугой
- газотермическое напыление сплавов
- централизованная и децентрализованная система управления







